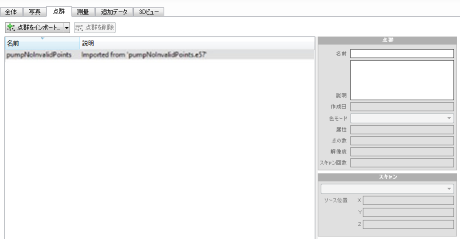
点群
「点群」タブでは、ブロックにアタッチされた一連の入力点群の編集や表示ができます。
点群をインポート
制限事項 - ContextCaptureはスキャンソースの位置が判明している点群のみを正しく処理できます。インポートされた点群で指定されているスキャンソースの位置が正しくない場合は3Dリコンストラクションに悪影響が及び、場合によっては3Dリコンストラクションの結果が完全に間違ったものになることがあります。
画像データセットと点群データセットのサイズは、ご使用のエディションにより制限される場合があります。「ソフトウェアのエディション」を参照してください。
静的スキャン
点群は次のファイルフォーマットの静的スキャンからインポートできます。
座標付けされた点群ファイルをインポートする場合は、ファイルのインポート時に空間参照系を指定してください。一度に複数のファイルをインポートできます。
ContextCaptureによる3Dリコンストラクションを可能にするために、スキャナ位置が判明している必要があります。入力ファイル内でアクセスできない場合は、スキャナ位置は手動で指定するか、あるいは対応するオプションをチェックすることでContextCaptureによって自動検出することができます。この場合、入力ファイルが1つの一意の位置から取得された1スキャンに対応することに注意してください。スキャナ位置を自動検出できるようにするには、地上にある点密度の高い楕円によって明確に定義されているスキャナ位置のみをスキャンに含める必要があります。複数のファイルを一度にインポートしている場合は、自動検出機能を引き続き利用することができ、ファイルごとに1つの位置が検出されます。
「点群の技術仕様」も参照してください。
モバイルスキャン
点群は次のファイルフォーマットのモバイルスキャンからインポートできます。
軌跡はフォーマットに応じて、時間に関連付けられた連続的なスキャナの位置を記述した別のテキストファイル(.txtまたは.csv)で提供する必要があります。ContextCaptureは、さまざまなテキストフォーマットの軌跡データを抽出するためのテキストファイルインポートウィザードを備えています。
提供された点群の3次元上の点にも軌跡と正確に関連付けられる時間データが含まれている必要があります。
「点群の技術仕様」も参照してください。
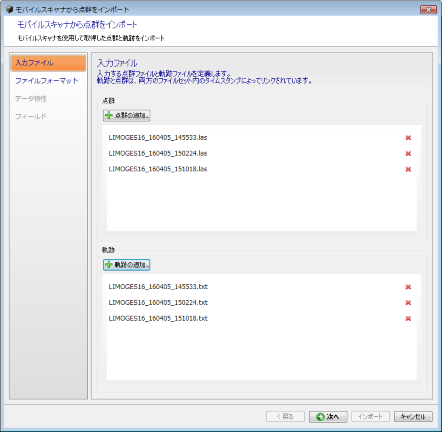
入力ファイル
入力する点群ファイルと軌跡ファイルを定義します。
軌跡と点群は、両方のファイルセット内のタイムスタンプによってリンクされています。
ファイルフォーマット
軌跡ファイルの読み込み方法を定義します。
「データのプレビュー」テーブルの各列に有効な情報が含まれるように、インポートパラメータを調整することができます。
- ファイルの先頭で無視する行数 - インポート時に無視するファイルのヘッダーの長さを定義します。
- 区切り文字 - 列の区切り文字を定義します。複数の文字を指定することができます。
区切り文字として連続したスペースを使用する場合などは、「連続区切り文字の結合」チェックボックスをオンにする必要があります。
- 小数点記号 - ドット(123.456)またはカンマ(123,456)です。
データ特性
座標付けされた点群ファイルをモバイルスキャンからインポートする場合は、適切な空間参照系を指定してください。点群と軌跡は同じ空間参照系内にある必要があります。
フィールド
軌跡データの列の役割を指定します。
各入力列をそれぞれの役割に関連付ける必要があります。
X(偏東距離)、Y(偏北距離)、Z(高さ/高度)、時間が必要です。
ProjectWise ContextShareからスキャンコレクションをインポート
ProjectWise ContextShareのスキャンコレクションから点群をダウンロードして追加します。
このコマンドにより、クラウドからスキャンコレクションを選択してダウンロードし、ブロックに追加することができます。
点群を管理
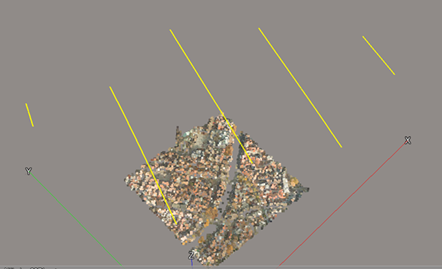
点群は異なる位置または軌跡を持つさまざまなスキャンソースに対応する一連のスキャンで構成されています。
インポートされた点群とスキャン位置はブロックの「3Dビュー」タブで表示できます。

「色モード」
このプロパティでは、インポートされた点群で使用可能な属性に応じて、点群の3D表示および再構築された3Dモデルのテクスチャリングのカラーソースを選択できます。